|
Gallery of movie demos from (some) previous projects
|
Binaural Localization (31MB WMV) (Sponsored by National Instruments) |
Vision Aware (41MB WMV) (Sponsored by National Instruments) |
Labyrinth (185MB MPG) |
|
PanoVision (99MB WMV) |
Visual servoing (14MB WMV) |
Semgo (49MB AVI) |
Coffe-e-mail (142MB MOV) |
Yano (114MB AVI) |
|
Gallery of pictures from (some) previous projects
|
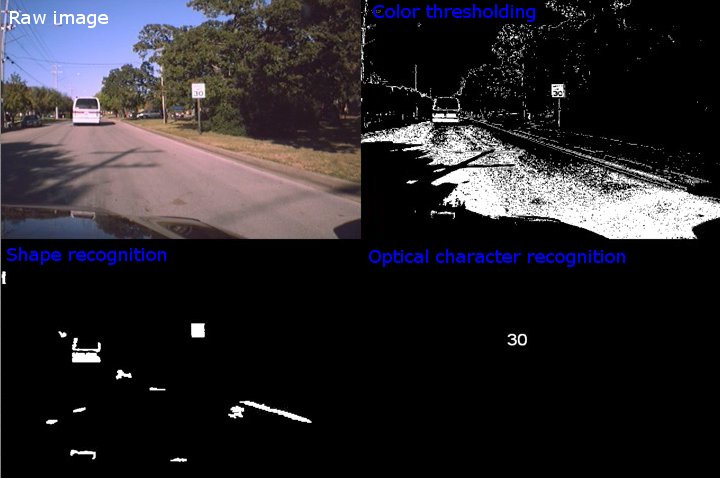
NI Speed Aware. The goal of this project was to warn drivers when they exceeded the posted speed limit. The system consisted of a Compact Vision System (donated by National Instruments), a webcam, and a GPS. The system employed computer vision techniques to detect speed limit signs, and optical character recognition to read the speed limit within. It would then compare this limit with the vehicle's velocity, measured with a GPS unit, and warn the driver if s/he exceeded the speed limit. The system was tested successfully on the road (!). | |
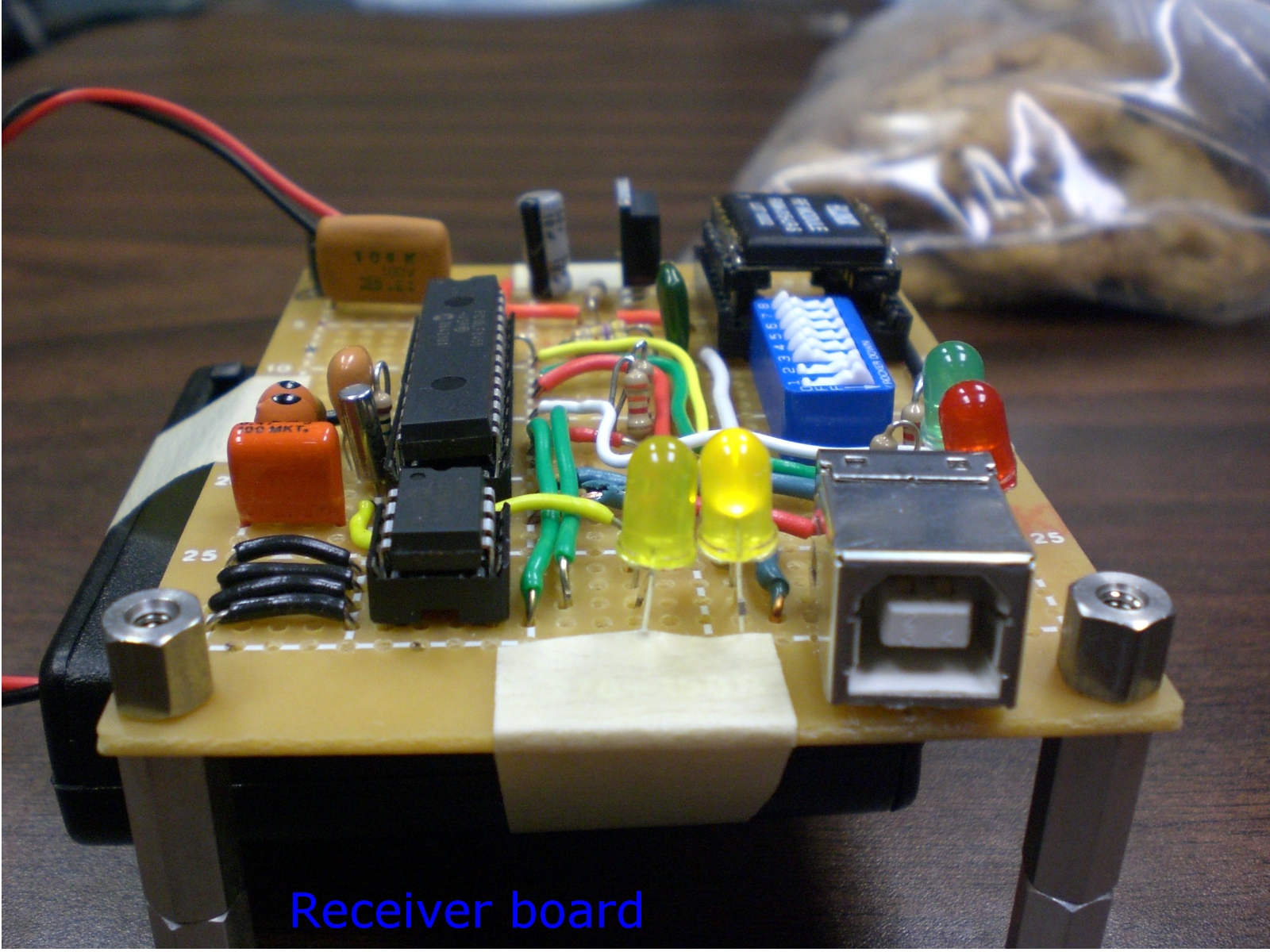
Pet deterrent. The goal of this project was to develop a system that would restrict access for pets in a home. The system consisted of a series of RF transmitters, placed at certain locations in the home, and an RF receiver, which was worn by the pet. The transmitter would send a unique code at specified intervals. The receiver would compare the transmitter ID with a lookup table of allowed and disallowed sites; if disallowed, the receiver would send a deterrent signal to the pet (not implemented). The receiver also tracks the time stamps of the different transmitters detected throughout the day, and upload them to a PC client application through USB. |
 |
|
|
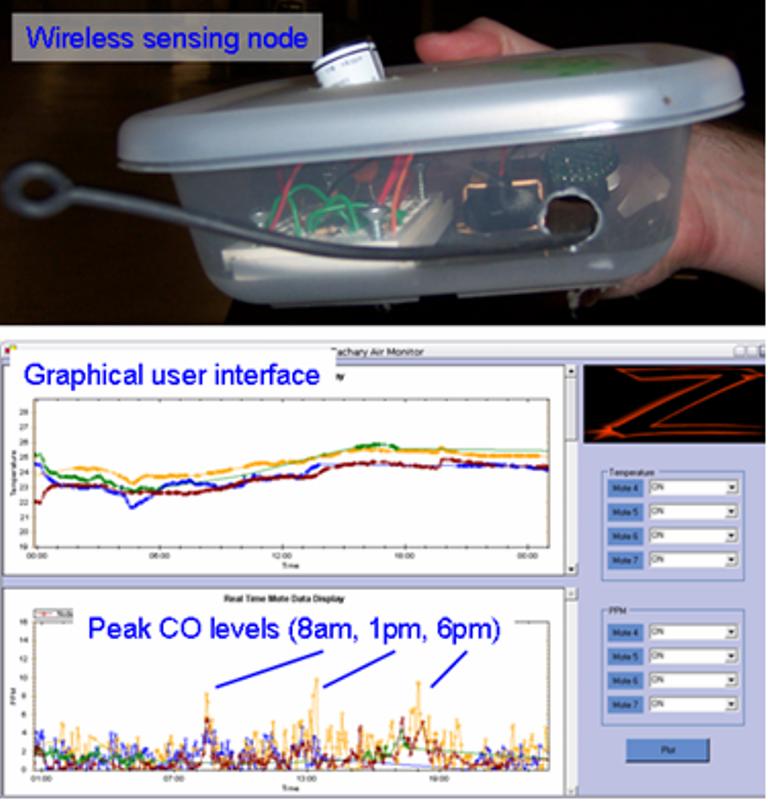
Air quality monitoring with a network of chemical sensors. The goal of this project was to develop a sensor network for monitoring carbon-monoxide (CO) emissions inside campus buildings. The system consisted of an array of Crossbow® motes, each mote housing an electrolytic CO sensor. The network was able to detect CO concentrations in the low parts-per-million range, and provide 24/7 on-line data visualization through the campus network.. | |
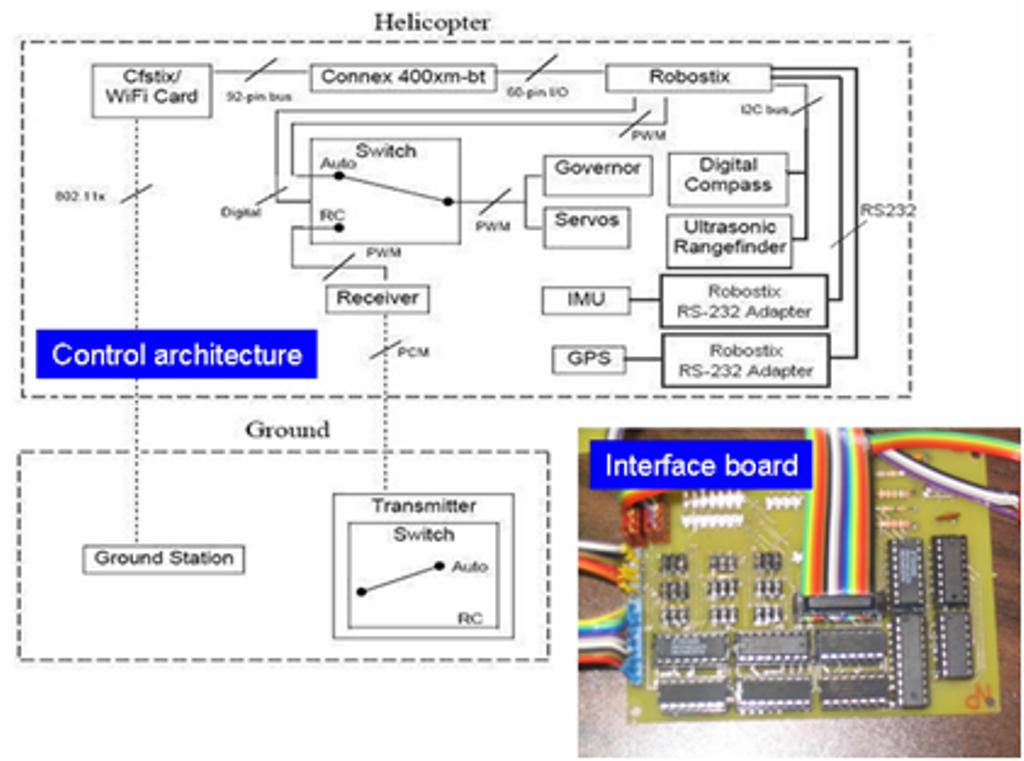
Fly-by-wire control for a robotic helicopter. The objective of this project was to develop an autonomous controller for a small helicopter vehicle, along with a fast switch to allow the user to regain manual control when needed. The students designed a microcontroller system, also based on the Gumstix/Robostix platform, which included pulse-width-modulated controls for five servo motors, and inputs from an Inertial Measurement Unit (IMU), a Global Positioning System (GPS), an ultrasonic rangefinder, and a digital compass. The final product was turned over to Professor Dez Song in our department, who will use it on his robotic helicopter.. |
 |
|
|
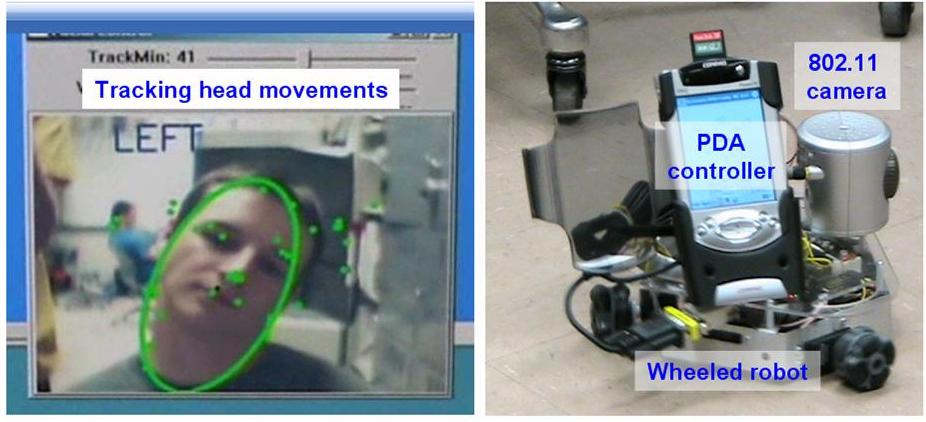
Visual servoing. The goal of this project was to develop a human-robot interface that would allow a user to explore a remote environment with a mobile robot. The system consisted of a small wheeled robot with a wireles camera and a wireless PDA, and a workstation with a webcam. The user would receive live feed from the robot camera, and would control the robot movements by making prespecified head movements (see figure) in front of the webcam. Right/left head shakes would command the robot to make right/left turns, up/down head nods would command the robot to move forward or stop. A watchdog safety thread ran on the robot's PDA to stop the robot if communications with the user were disrupted. | |
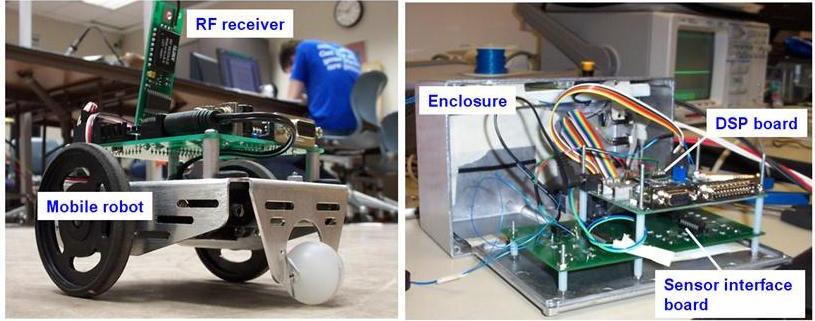
Robot control with EMG signals. The goal of this project was to develop a human-robot interface based on physiological signals. The system consisted of an array of electromyogram (EMG) sensors, which detected electrical activity in different muscles of the user, a DSP board that performed pattern recognition on the EMG signals, and a small mobile robot controlled via RF. The user would train the pattern classifier on a subset of hand gestures which, when expressed at a later time, would serve as individual commands for the robot. |
 |
|
|
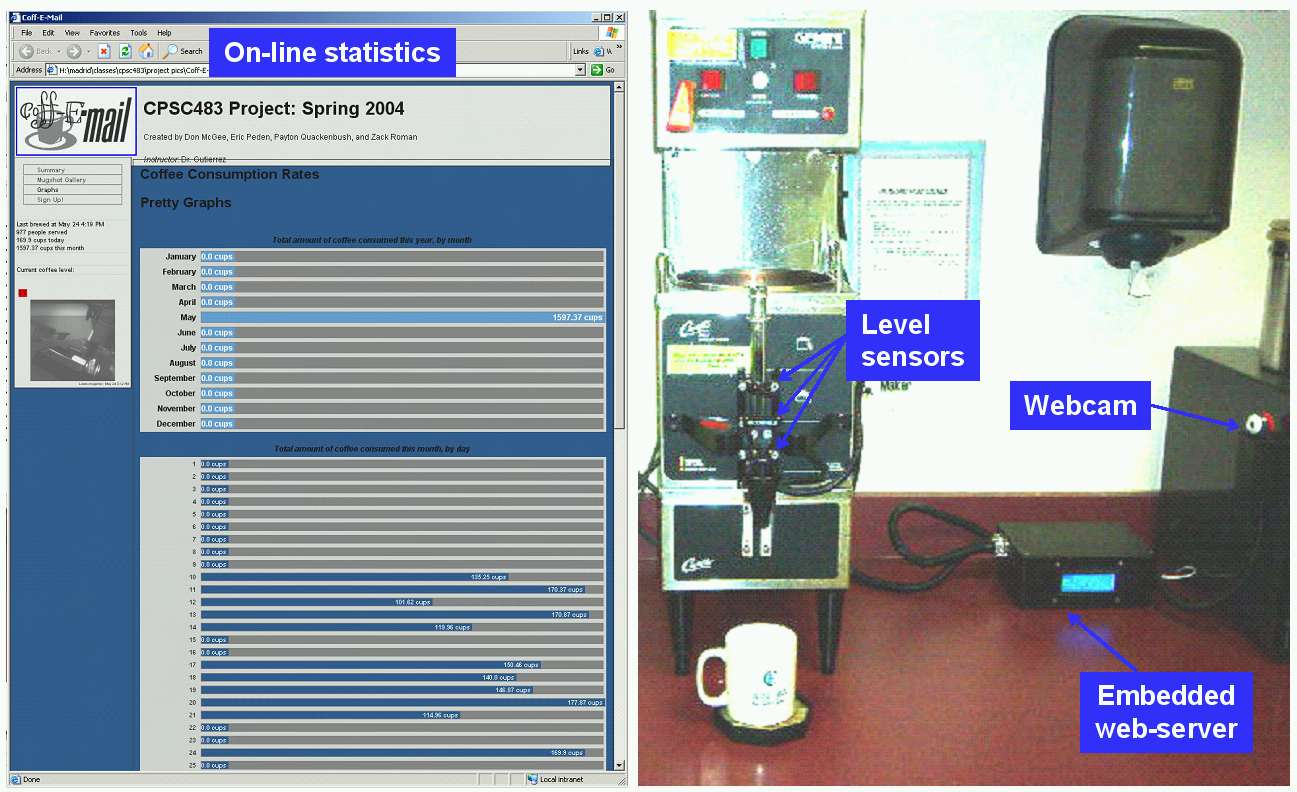
Coff-e-mail. The goal of this project was to develop a low-cost embedded web-server that would keep logs of coffee consumption in the department’s student lounge. The system contained photocells for measuring current levels of coffee, motion sensors for detecting when coffee was being poured, and a low-cost camera to capture an image of the coffee mug. The system kept statistics on-line and also informed registered users when a fresh coffee pot was being brewed. | |
Motion tracking
with infra-red imaging. The goal of this
project was to develop a motion capture system based on IR imaging.
The students designed a head-mounted frame to allow recovery of 3D
head rotations (roll,
pitch and yaw), developed a graphical user interface, automated
a number of otherwise time-consuming tasks (e.g., initial detection
of markers in the face), and integrated the audio-visual capture
system with an MPEG-4 compliant facial animation engine. |
||
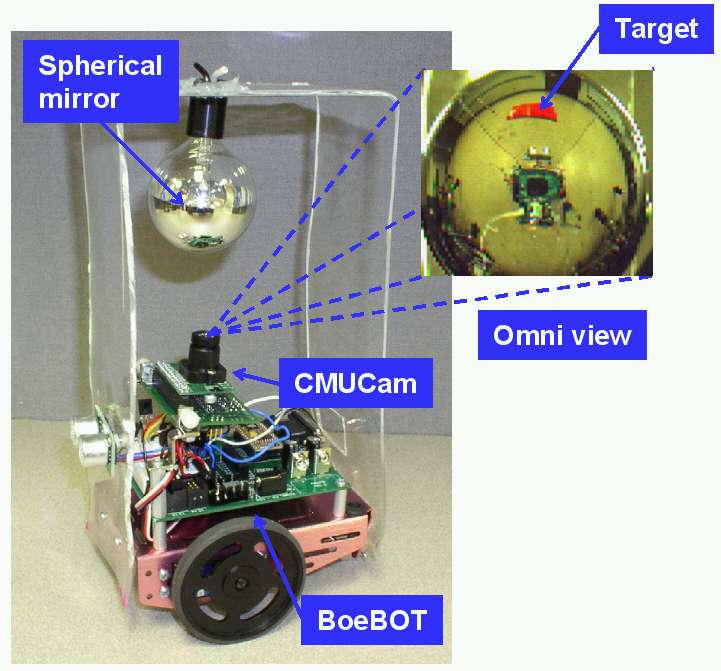 |
Omni-Directional Vision System for Mobile Robots. The objective of this project was to design and integrate an omni-directional vision system (ODVS) for a mobile robot. The ODVS consisted of a CCD array (based on the CMUCam) coupled with a spherical mirror (a chromed light bulb), that generated a 360-degree view of the surroundings of the robot. The students were able to integrate the ODVS with a miniature mobile robot, and track a color moving target in real-time. | |
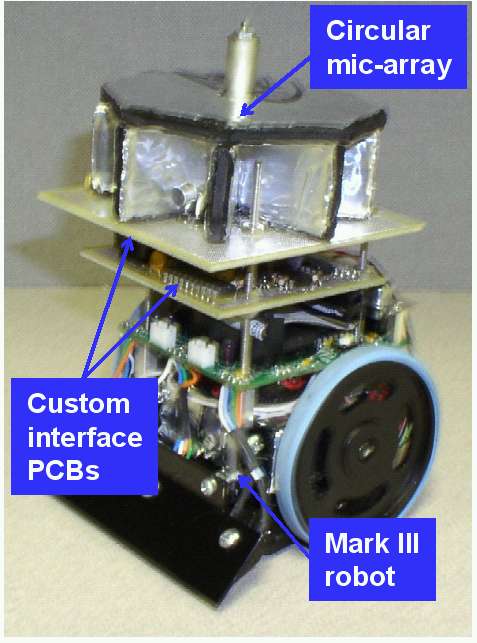
Acoustic
Navigation for Mobile Robots. The goal of this project
was to develop a microphone array to allow a miniature mobile
robot to detect acoustic beacons. The array consisted of eight
miniature microphones in a ring configuration to provide 360
degree sound localization. The students designed a custom printed
circuit interface board for the microphones, which also contained
a programmable filter bank that allowed the robot to “listen” to
eight different center frequencies. |
 |
|
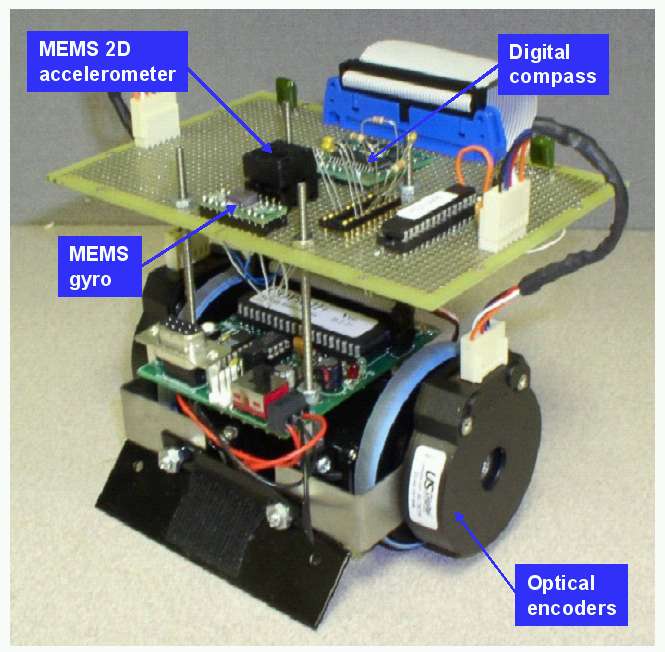 |
Dead-Reckoning System for Mobile Robots. The objective of this project was to design a dead-reckoning system for mobile robots based on odometry, inertial navigation and a digital compass. Odometry was achieved with optical encoders attached to the wheel axles of a miniature robot. The inertial navigation consisted of a 2-axis MEMS accelerometer and a MEMS gyroscope, which allowed the robot to measure linear and angular accelerations. These two dead-reckoning modalities were complemented with information from a digital compass. The students also investigated sensor fusion strategies to combine information from all these sensors. | |