
Abstract
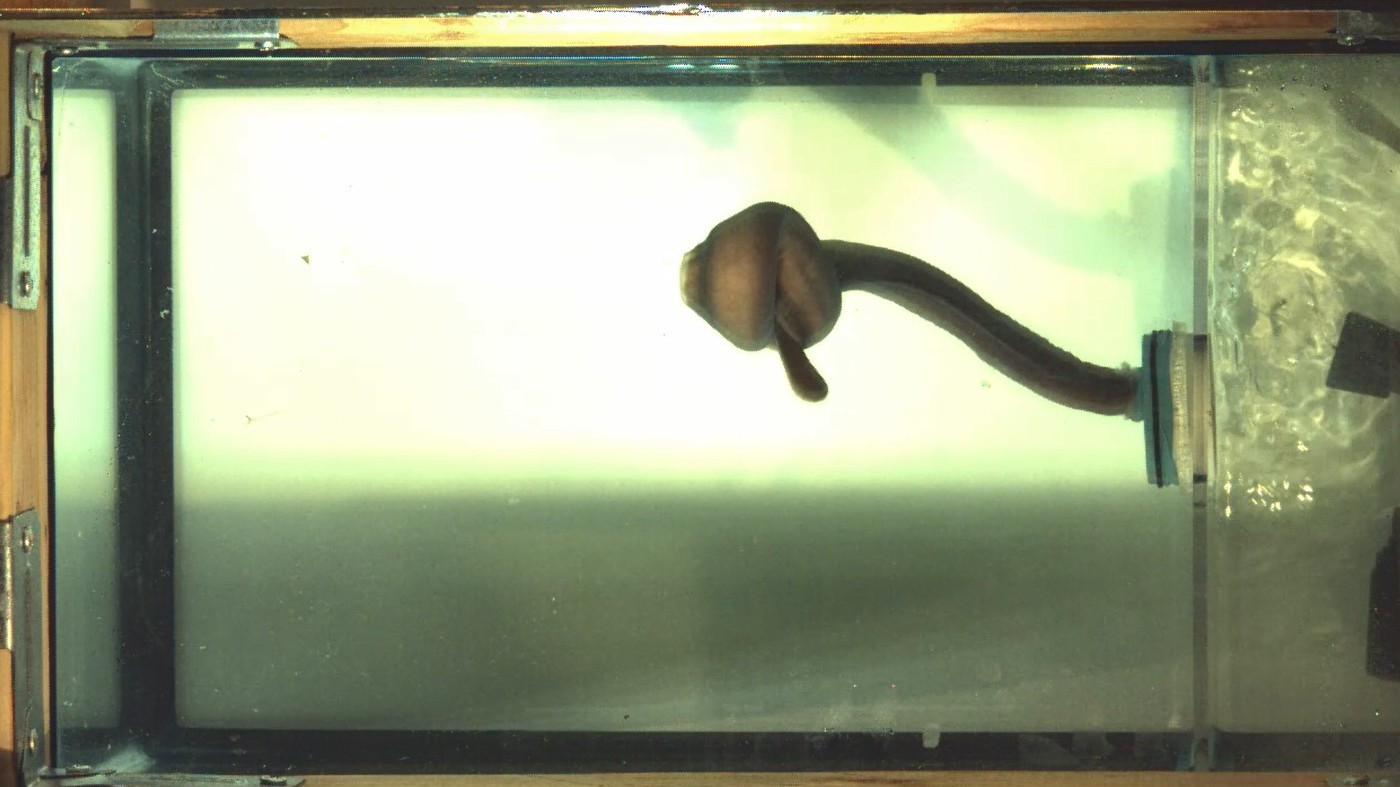
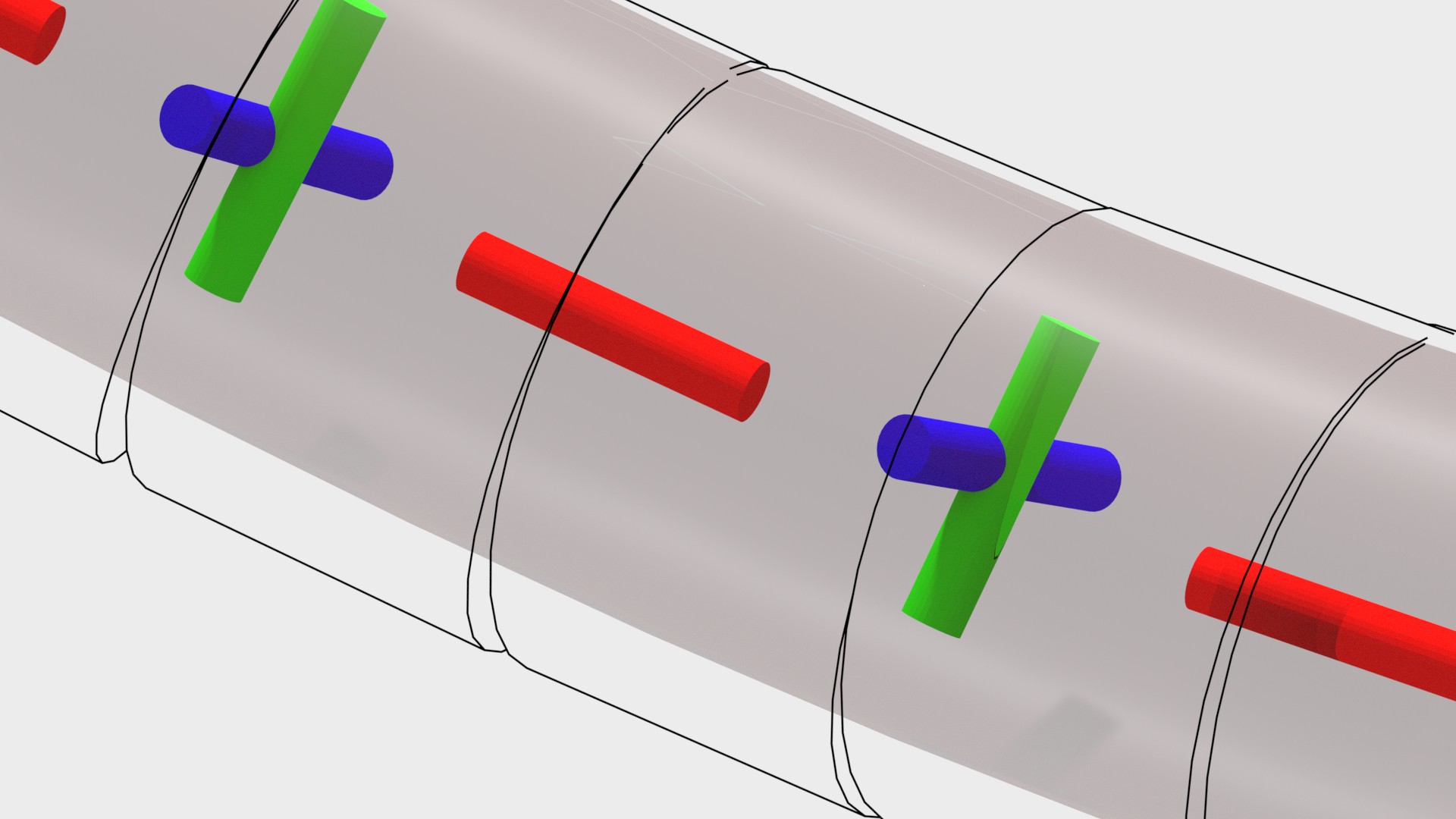
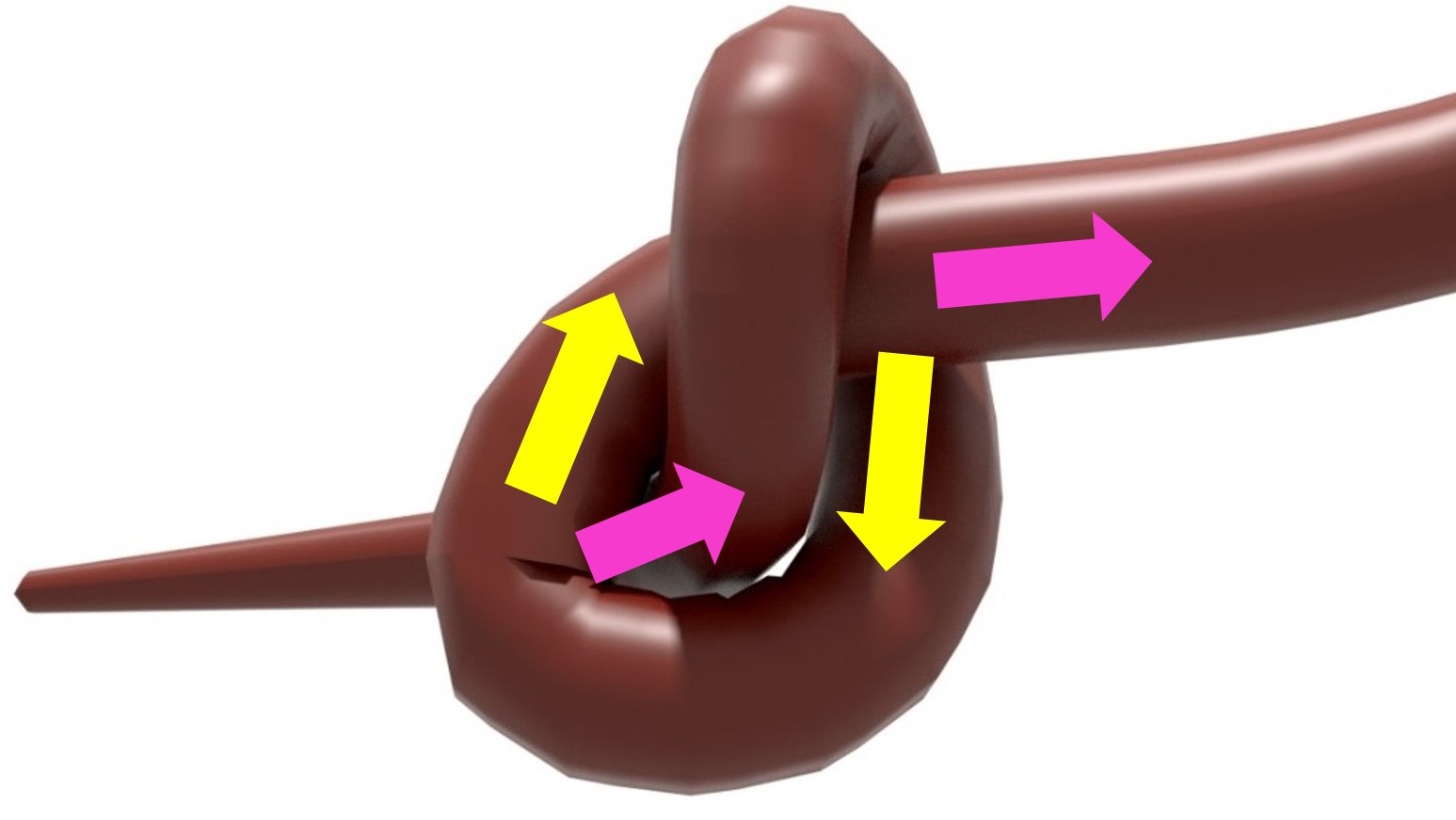
Hagfish are capable of not only forming knots, but also sliding them along the length of their bodies. This remarkable behavior is used by the animal for a wide variety of purposes, such as feeding and manipulation. Clearly of interest to biologists, this knotting behavior is also relevant to other fields, such as bioinspired soft robotics. However, this knot-sliding behavior has been challenging to model and has not been simulated on a computer. In this paper, we present the first physics-based simulation of the knot-sliding behavior of hagfish. We show that a contact-based inverse dynamics approach, motivated by the biological concept called positive thigmotaxis, works very well for this challenging control problem.
Videos
Bibtex
@article{Hwang2019,
author = {Hwang, Yura and Uyeno, Theodore A. and Sueda, Shinjiro},
title = {Bioinspired simulation of knotting hagfish},
journal = {Springer},
volume = {11844},
pages = {75-86},
year = {2019},
month = {October},
type = {Journal Article}
}Acknowledgments
We thank Austin Haney for helping to record video of knotting Pacific hagfish, Eptatretus stoutii and Washington Department of Fish and Wildlife officer Donna Downs for their procurement.
This work was supported in part by the National Science Foundation (IOS-1354788 to T.A.U. and CAREER-1846368 to S.S.).