In this lab, we’re going to use arc length parameterization to draw equally spaced points on a cubic spline curve.
Please download the lab and go over the code.
When you compile and run the source code, you should be able to
insert control points by shift clicking, and rotate the camera by
clicking and dragging the mouse. Press the r key to load
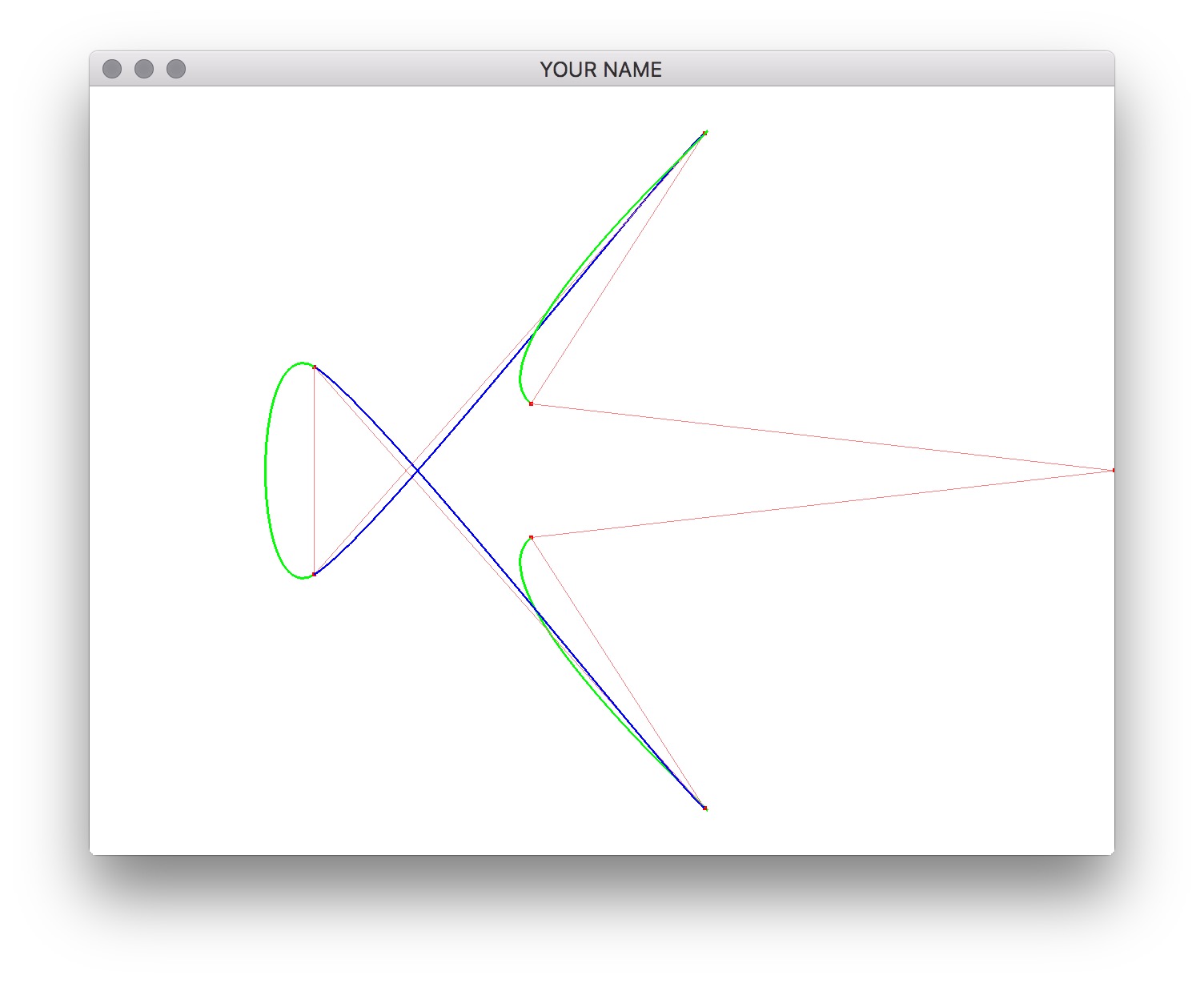
some preset control points, and the c key to clear. We’re
going to use this scene as the test case, so do not change this part of
the code. The curve is now colored in green and blue. Each color
corresponds to a segment defined by four control points.
There are two functions to implement: buildTable() and
s2u(). (Feel free to add other functions though!) Note that
the spline basis matrix, B, is constructed using the
line:
glm::mat4 B = (type == CATMULL_ROM ? Bcr : Bb);The contents of Bcr and Bb are already
defined for you.
First, write the function, buildTable(), which builds
the table that lists the s value for each u.
Here, s is the total distance traveled along the curve, and
u is the concatenated spline parameter in the range
[0, ncps-3]. (ncps is the number of control
points.) There is a global variable called usTable that
stores this information as an STL vector. The class type of this
variable is
std::vector<std::pair<float,float> >. (Note
that when defining nested template types, you should insert a space
between the closing brackets: > >.) To add a new
row to this table (i.e., new element to this vector), use the
push_back() and the make_pair() function
calls. For example, the very first row should be
[u=0, s=0], so you should call
usTable.push_back(make_pair(0.0f, 0.0f));.
Use 5 samples for each segment to compute the distance along the
curve. Since there are 8 control points in the preset test scene (press
r), there are \(8-3=5\)
segments. This means that \(u\) should
take on the values \(0.0, 0.2, 0.4, \cdots,
4.8, 5.0\). First, use the simple formula to compute the distance
between two u values, \(u_A\) and \(u_B\).
\[ \begin{aligned} \bar{P}(u_A) &= G B \bar{u}_A,\\ \bar{P}(u_B) &= G B \bar{u}_B,\\ s &= \| \bar{P}(u_B) - \bar{P}(u_A) \|. \end{aligned} \]
The values should look like this for the preset test scene with Catmull-Rom.
| \(u\) | \(s\) | \(u\) | \(s\) | \(u\) | \(s\) | \(u\) | \(s\) | \(u\) | \(s\) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| \(0.0\) | \(0.00000\) | \(1.0\) | \(0.82383\) | \(2.0\) | \(2.21177\) | \(3.0\) | \(2.85746\) | \(4.0\) | \(4.24539\) | ||||
| \(0.2\) | \(0.13984\) | \(1.2\) | \(0.99348\) | \(2.2\) | \(2.28435\) | \(3.2\) | \(3.05345\) | \(4.2\) | \(4.29233\) | ||||
| \(0.4\) | \(0.35787\) | \(1.4\) | \(1.31196\) | \(2.4\) | \(2.43888\) | \(3.4\) | \(3.38470\) | \(4.4\) | \(4.47283\) | ||||
| \(0.6\) | \(0.59639\) | \(1.6\) | \(1.68453\) | \(2.6\) | \(2.63035\) | \(3.6\) | \(3.75727\) | \(4.6\) | \(4.71135\) | ||||
| \(0.8\) | \(0.77689\) | \(1.8\) | \(2.01578\) | \(2.8\) | \(2.78487\) | \(3.8\) | \(4.07574\) | \(4.8\) | \(4.92939\) | ||||
| \(5.0\) | \(5.06923\) |
Make sure you get these numbers exactly. Note that the last value of
s, corresponding to u=5.0, is the total length
of the spline, which is 5.06923 for our preset Catmull-Rom
test scene.
Now, use the 3-point Gaussian quadrature formula instead to compute the length. (Note the prime on \(P\).)
\[ \begin{aligned} s &= \frac{u_B - u_A}{2} \sum_{i=1}^{3} \left( w_i \| \bar{P}'\left( \frac{u_B - u_A}{2} x_i + \frac{u_A + u_B}{2}\right) \| \right),\\ \bar{P}'(u) &= G B \bar{u}',\\ \bar{u}' &= \begin{pmatrix} 0 & 1 & 2u & 3u^2\end{pmatrix}^T. \end{aligned} \]
For a 3-point Gaussian quadrature, the sum goes from 1 to 3. The corresponding \(x_i\) and \(w_i\) are listed below for your convenience. See http://en.wikipedia.org/wiki/Gaussian_quadrature for more information.
| \(i\) | \(x_i\) | \(w_i\) |
|---|---|---|
| \(1\) | \(-\sqrt{3/5}\) | \(5/9\) |
| \(2\) | \(0\) | \(8/9\) |
| \(3\) | \(\sqrt{3/5}\) | \(5/9\) |
With Gaussian quadrature, the spline length should be
5.14943, using the same number of sample points (25 rows),
which is a lot closer to the actual value of 5.14760. The
greater the curvature, the bigger the difference will be between the
previous method and this method.
Implement the function s2u(), which converts from arc
length s to spline parameter u by performing a
linear search through the table. Given a value of s, scan
through the table to find the indices of the two rows that bracket that
s value. Then use linear interpolation to compute the
u value.
\[ \alpha = \frac{s - s_0}{s_1 - s_0}, \qquad u = (1 - \alpha) \cdot u_0 + \alpha \cdot u_1. \]
For example, if s=0.417, then the two indices are 2 and
3. (Remember that the 0th row contains [u=0, s=0].) The
corresponding u values are 0.4 and
0.6. Linear interpolation would yield:
\[ \begin{aligned} \alpha &= \frac{0.417 - 0.357877}{0.596397 − 0.357877} = 0.2479,\\ u &= (1−0.2479)(0.4)+(0.2479)(0.6)=0.4496. \end{aligned} \]
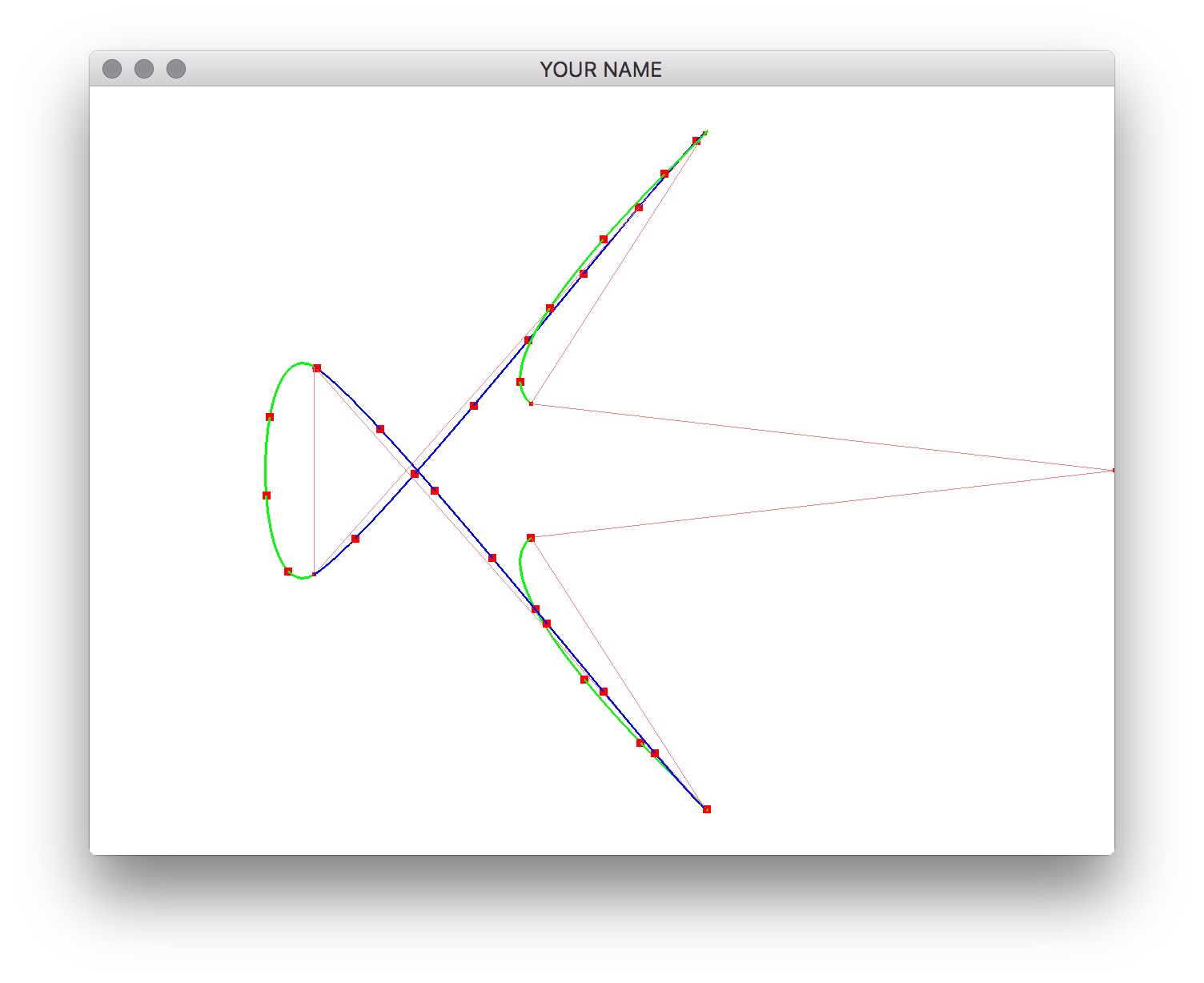
Once this is implemented, you should be able to see equally spaced
markers by pressing a. The preset scene should look like
this.