3D IK-8
Kevin Santos
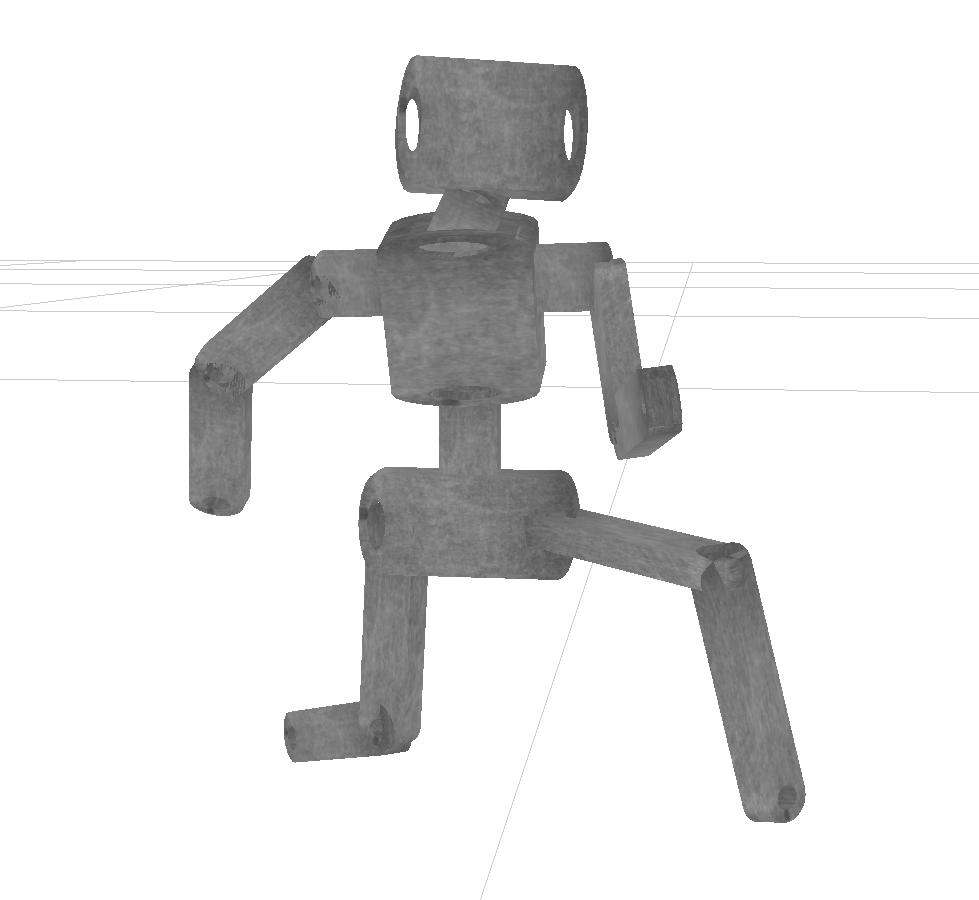
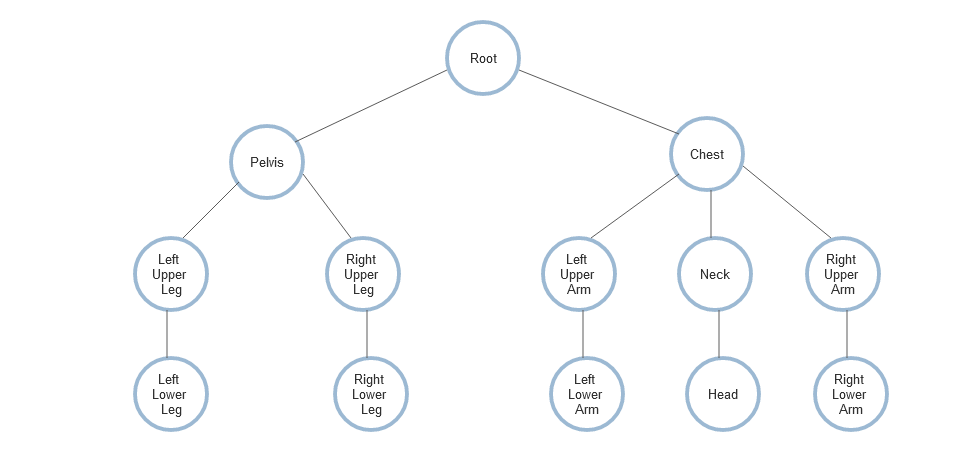
This project involves Inverse Kinematics to move the limbs of a model made in 3D. It adds X and Y rotations and is applied to the model that contains different branchings. The majority of the materials used for the project are from Assignment 4, which is a combination of Lab 6 and 7 and the camera class comes from Assignment 2.
Here is the final presentation of this project