Simulation of body hanging
By Patrick Riordan
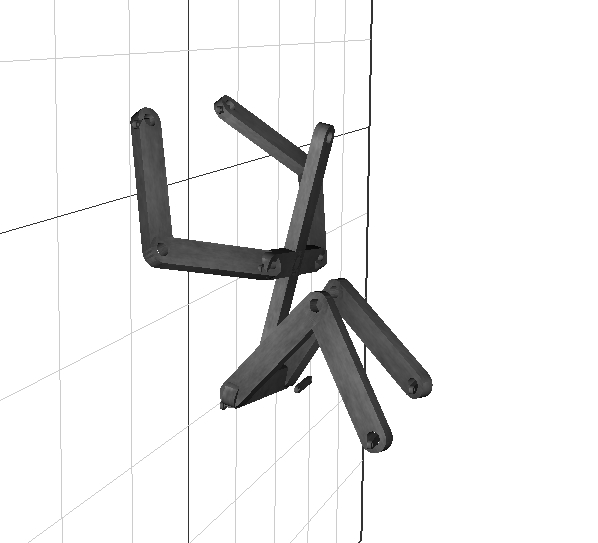
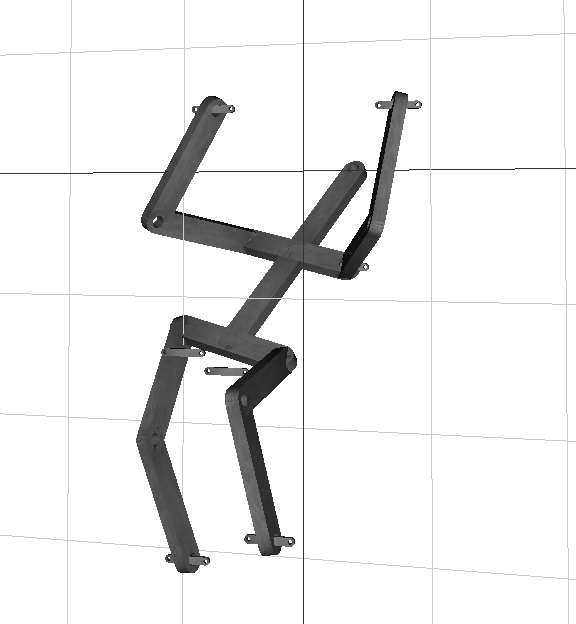
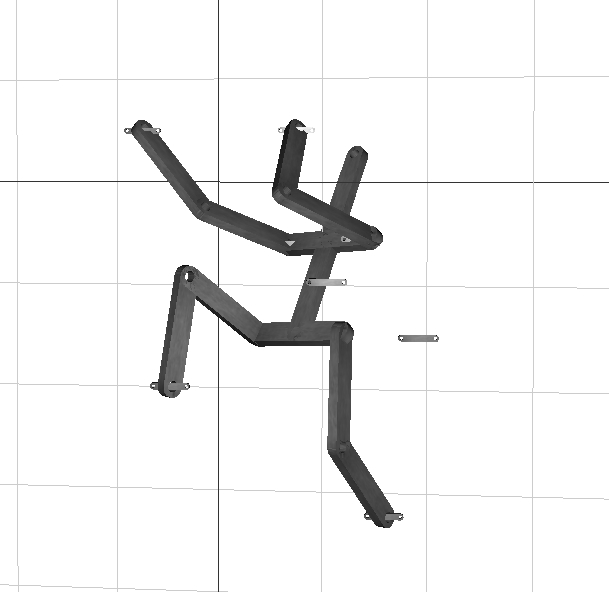
I wanted to simulate a person hanging by their hands. Since we did not go over ragdoll physics within the class I decided to use a Mass Spring simulation with implicit Euler integration (similar to the Cloth simulation lab) combined with inverse kinematics. The idea was to model the body and the legs with a mass spring system and then use inverse kinematics to place bones to match them. I had hoped that I could implement constraints on the masses representing the legs by first solving inverse kinematics in order to match the bone positions to the masses and then moving the masses to the new bone position. This approach proved infeasible. The solver gave sometimes jumpy results and moving the masses created forces within the system, making the person increase in energy randomly.
The final approach I used was to use a simple mass spring model with four masses representing the torso arranged in a rectangle with springs connecting them all. There are springs connected to fixed points representing where the hands are supposed to be holding on to. For each leg I simplified the system to have only one mass representing the position of the leg. This gives reasonable results, but does not quite emulate a ragdoll.